Полуавтомат 53А20Ф4 с ЧПУ предназначен для нарезания зубьев прямозубых и косозубых цилиндрических колес, червячных колес, а также колес с конусным и бочкообразным зубом в единичном и мелкосерийном производстве. Класс точности станка П.
Техническая характеристика зубофрезерного полуавтомата 53А20Ф4 с ЧПУ. Наибольший диаметр обрабатываемых зубчатых колес (прямозубых) 200 мм; наибольший нарезаемый модуль 6 мм; пределы частот вращения фрезы 80-300 мин -1 ; пределы подач радиальной и вертикальной 1-300 мм/мин, тангенциальной 0,5-80 мм/мин; величины подач на быстром ходу радиальной и вертикальной 1000 мм/мин, тангенциальной 500 мм/мин; габаритные размеры станка 3555x3250x3030 мм.
Устройство ЧПУ полуавтомата 53А20Ф4 на базе микро-ЭВМ «Электроника-60» типа 2С85-62. Число управляемых координат всего 5, одновременно управляемых 4; коэффициент деления шага 200; дискретность перемещений по координатам X, Y 0,0025 мм, Z 0,001 мм.
На пульте ЧПУ в соответствующем коде устанавливают следующие параметры обрабатываемого зубчатого колеса: число зубьев z, модуль m, ширину венца b, наружный диаметр d a , синус угла наклона зубьев, направление винтовых линий колеса и фрезы, наружный диаметр фрезы d a0 и ее число заходов z 1 . На пульте ЧПУ задаются также частоты вращения фрезы при черновом и чистовом рабочих ходов, кодовый номер положения перебора фрезы, номер диапазона подачи и др.
Управление работой полуавтомата производится от постоянных программ, заложенных в память системы ЧПУ, обычно это пять основных наиболее сложных циклов обработки зубчатых колес, на базе которых строятся упрощенные циклы обработки.
Основные механизмы, принцип работы и движения в станке 53А20Ф4 (рис. 149). Станина А полуавтомата имеет коробчатую форму, по ее прямоугольным направляющим перемещается стойка с инструментальным суппортом Б. Стойка прижимается к направляющим четырьмя гидравлическими зажимами. На столе Г размещен шпиндель заготовки, которая поджимается кронштейном контрподдержки В. Суппорт расположен на каретке, имеющей круговой паз, в который входят гидравлические зажимы суппорта. Для обработки всей номенклатуры заготовок станок должен иметь следующие движения, управляемые от устройства ЧПУ: главное движение — вращение фрезы (координата U); подачи: вертикальную фрезерной каретки (координата Y); радиальную стойки (координата X), тангенциальную инструмента (координата Z), вращение детали (координата W’). Перемещение червячной фрезы по координате Z применяют при нарезании червячных колес методом протягивания или при нарезании цилиндрических колес для полного использования режущей части фрезы.
Взаимосвязанное вращение приводов по координатам W’, V и Y используют для обработки цилиндрических колес; по координатам W’, U, Y и Z — зуба червячных колес и червяков; по координатам Y и X — зуба бочкообразного и конусного.
На станке колеса модулем до 2 мм нарезают за один рабочий ход при точности обработки до 7-й степени и в два рабочих хода при точности выше 7-й степени. Колеса модулем 3-6 мм нарезают за два рабочих хода при чистовой обработке, а также при черновой обработке под последующую чистовую.
На нижнем конце шпинделя заготовки закреплено зубчатое колесо z = 120 торможения. Торможение производится гидромотором ГД. Червяк делительной пары выполнен с переменным шагом для регулирования зазора в передаче.
Возможны следующие модификации обработки в циклах при обработке прямозубых и косозубых колес: с радиальным врезанием и без врезания, со встречной и попутной подачей, за один и два рабочих хода; при обработке червячных колес: с радиальным врезанием и без врезания, с протяжкой вправо или влево, без протяжки.
Рис. 149. Кинематическая схема зубофрезерного полуавтомата 53А20Ф4 с ЧПУ
Источник
Кинематическая схема зубофрезерного полуавтомата 53А20Ф4 с ЧПУ. Главное движение. Движения подачи.
Кинематика полуавтомата 53А20Ф4 выполнена с жесткой связью в цепи деления и безгитарной наладкой связей вращения заготовки и инструмента, перемещений инструмента и заготовки. Согласование движений в полуавтомате осуществляется дополнительным вращением дифференциала, встроенного в кинематическую цепь деления. Скорости вращения привода дифференциала согласованы с вращением и перемещением инструмента через интерполяторы устройства ЧПУ.
Главное движение зубофрезерного полуавтомата 53А20Ф4 осуществляется от двигателя постоянного тока M1 (N = 7 кВт, n=1200 мин -1 ), питаемого от тиристорного преобразователя. Движение шпинделю фрезы передается через зубчатую пару z = 36-36, блок Б1, зубчатые пары z = 23-23, z = 23-23, z = 25-100. При переключении блока Б1 получаем два диапазона частот вращения фрезы 80-180 мин -1 и 181-300 мин -1 . Частота вращения фрезы определяется по формуле

где f v — частота управления приводом фрезы; i Б1 — передаточное отношение блока Б1; 2,5 — передаточное число мультипликатора резольвера главного привода; 200 — коэффициент деления шага (взят из характеристики устройства ЧПУ); 4 — постоянное передаточное число зубчатых колес привода.
Тогда частота управления приводом (Гц)
На шпиндель VI насажен маховик со встроенным в него фрикционным тормозом. Тормоз состоит из зубчатых колес z=21-86 с передаточным отношением на 0,1 больше, чем передаточное отношение колес z=25-100, что заставляет их вращаться с проскальзыванием относительно маховика, в котором находятся прижимные кулачки. Усилие прижима кулачков к фрикционному диску, жестко сидящему на колесе z=86, регулируется пружинами.
Рис. 149. Кинематическая схема зубофрезерного полуавтомата 53А20Ф4 с ЧПУ
Движения подачи зубофрезерного полуавтомата 53А20Ф4 . В качестве приводов подач по координатам X, Y, Z, W’ на станке используются высокомоментные двигатели постоянного тока.
Радиальная подача фрезы (координата X) осуществляется от электродвигателя М3 (N = 1,7 кВт, n=800 мин -1 ) через червячную передачу z = 3-24 и винт-гайку качения с шагом Р = 10 мм. Частота управления приводом радиальной подачи f x определяется из уравнения кинематического баланса между частотой вращения двигателя М3 и радиальной подачей Sx от ходового винта:
Дискретность перемещения по координате X

Вертикальная подача фрезы (координата Y) осуществляется от электродвигателя M4 (N = 1,7 кВт, n= 800 мин -1 ) через передачи z=40-40, z=3-24 и винт — гайку качения о шагом Р=10 мм.
За один оборот стола фреза проходит вдоль оси колеса путь, равный величине вертикальной подачи S Y , за это же время фреза сделает z/z 1 оборотов, где z — число нарезаемых зубьев, z 1 — число заходов фрезы.

где f Y — частота управления приводом
вертикальной подачи, Гц. Дискретность перемещения по координате Y

Тангенциальная подача фрезы (координата Z) осуществляется электродвигателем М5 (N = 1,7 кВт, n=1000 мин -1 ), М= 17 Н*м) через зубчатые пары z = 28-28, z = 30-82, z = 82-20, червячную передачу z = 2-30 и винт — гайку качения с шагом Р = = 5 мм. Уравнение кинематического баланса связывает вращение фрезы с ее перемещением S Z (мм) за один оборот стола (фреза за это время сделает z/z 1 оборотов). Тогда
Источник
53А20 Станок зубофрезерный вертикальный полуавтомат
схемы, описание, характеристики

Сведения о производителе вертикального зубофрезерного станка 53А20
Производитель вертикального зубофрезерного станка 53А20 Вильнюсский станкостроительный завод им. 40-летия Октября.
Продукция вильнюсского станкостроительного завода им. 40-летия Октября
53А20 Станок вертикальный зубофрезерный полуавтомат. Назначение и область применения
Станок зубофрезерный 53А20 заменил в производстве устаревшую модель 5К310 и был заменен на более совершенную модель 53А20В.
Зубофрезерный станок — полуавтомат 53а20 предназначен для нарезания зубьев цилиндрических прямозубых, косозубых и червячных колес в условиях единичного, мелкосерийного и серийного производства.
Обработка зубчатых колес ведется в наладочном и полуавтоматическом режимах. При работе в режиме двухпроходного цикла возможно изменение режимов резания во втором проходе.
Станок 53А20 имеет вертикальную двухстоечную компоновку с перемещающейся фрезерной стойкой. Несущие корпуса и элементы кинематической цепи обладают повышенной жесткостью. Подвижные узлы при обработке зубчатых колес фиксируются на направляющих с помощью гидроцилиндров. Шпиндели изделия и инструмента выполнены на подшипниках скольжения. Трехскоростной электродвигатель главного движения с двухступенчатой ременной передачей и двухскоростной электродвигатель привода осевой подачи обеспечивают удобство настройки станка и оптимизацию режимов резания. Электро- и гидрооборудование вынесено за пределы станка.
Разработчик — Вильнюсский станкостроительный завод им. 40-летия Октября.
Модификации зубофрезерного полуавтомата 53А20
- 53А20 — станок зубофрезерный нормальной точности (Н по ГОСТ 8—82)
- 53А20в — станок зубофрезерный высокой точности (В по ГОСТ 8—82)
- 53А20а — станок зубофрезерный особо точный (А по ГОСТ 8—82)
Габариты рабочего пространства зубофрезерного полуавтомата 53А20
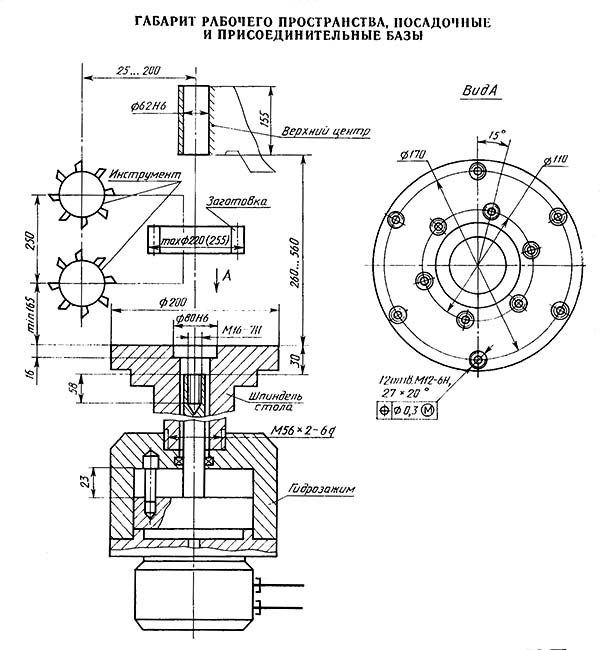
Габариты рабочего пространства зубофрезерного полуавтомата 53а20
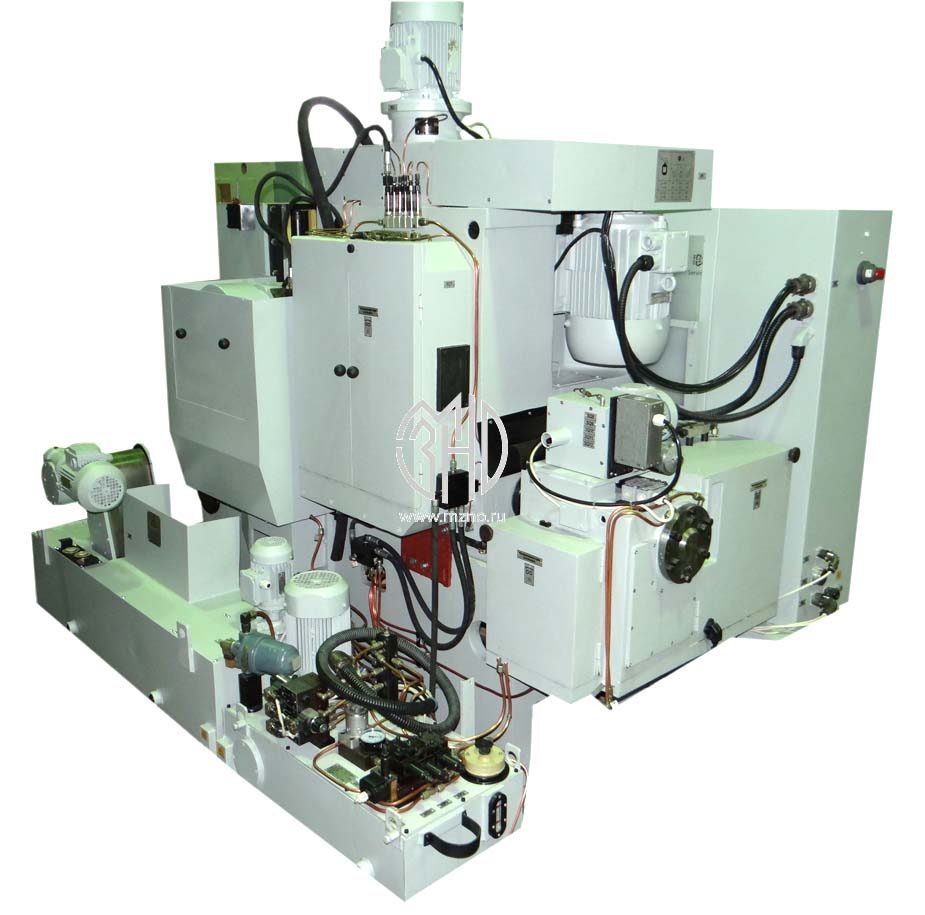
Общий вид и общее устройство станка 53А20

Фото зубофрезерного станка 53а20
Общий вид и общее устройство станка 53А20
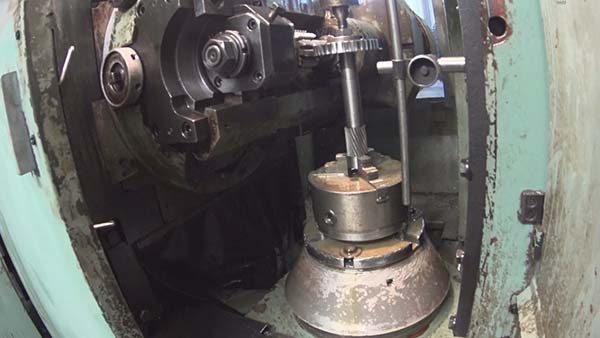
Фото зубофрезерного станка 53а20
Общий вид и общее устройство станка 53А20

Фото зубофрезерного станка 53а20
Общий вид и общее устройство станка 53А20. Суппорт
Вид сзади зубофрезерного станка 53а20
Общий вид и общее устройство станка 53А20. Суппорт
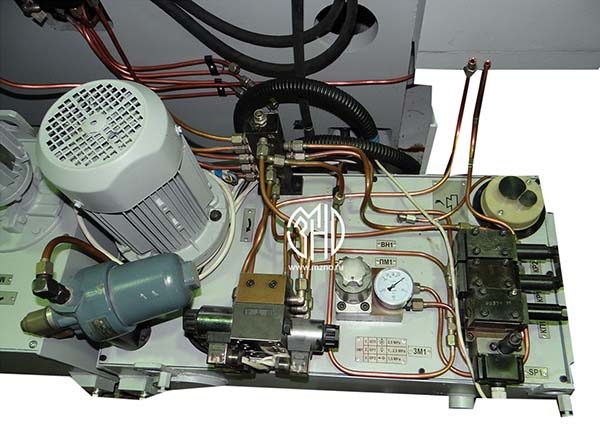
Гидростанция зубофрезерного станка 53а20
Установочный чертеж зубофрезерного станка полуавтомата 53А20
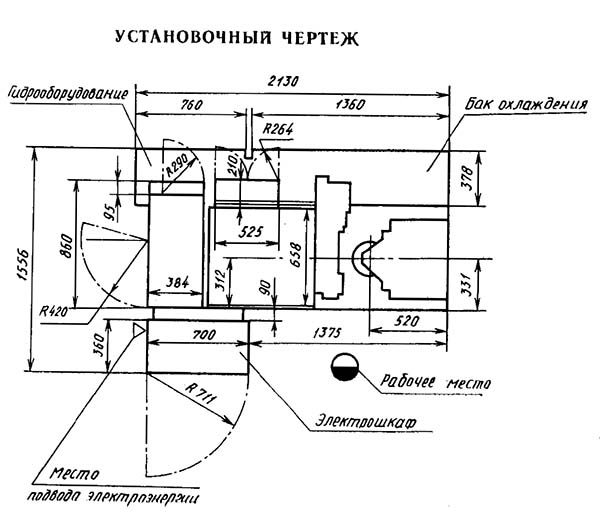
Установочный чертеж зубофрезерного станка 53а20
53А20 Станок зубофрезерный вертикальный полуавтомат. Видеоролик.
Технические характеристики зубофрезерного станка 53А20
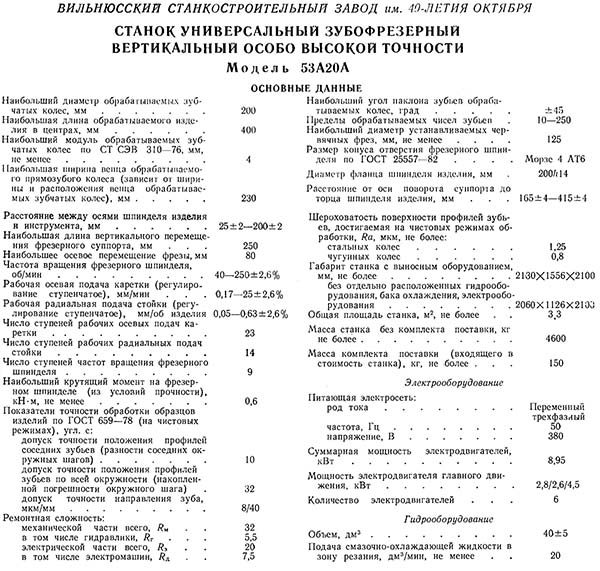
Технические характеристики зубофрезерного станка 53а20
Список литературы по зубообработке
Связанные ссылки. Дополнительная информация
Источник
Сборник индивидуальных заданий для самостоятельной работы по металлорежущим станкам , страница 21
Выполнить кинематический анализ зубодолбежного станка модели 5122 и произвести его настройку на нарезание цилиндрического прямозубого колеса.
1. Дать общий вид станка с указанием основных узлов, привести техническую характеристику и определить его назначение.
2. Дать принципиальные схемы нарезания колес наружного и внутреннего зацепления. Привести схему кинематической структуры станка и проанализировать ее.
3. Выполнить кинематическую схему станка и произвести ее анализ с выводом, расчетных формул настройки кинематических цепей.
4. Произвести настройку кинематических цепей при нарезании колес по следующим данным:
Вид заце-пления (наруж. или внутр.)
Сред. скорость резания Vср,м/мин
Выполнить сравнительный анализ кинематики зуборезного станка модели 5М324А и зубофрезерного станка модели МА70Ф4 с ЧПУ.
1. Дать общий вид станка мод. 5М324А и указать основные узлы. Определить назначение станка и привести его техническую характеристику.
2. Дать принципиальные схемы обработки на станке.
3. Выполнить частные структурные схемы станка и проанализировать их. Дать общую структурную схему станка..
4. Выполнить кинематическую схему станка и проанализировать ее с выводом расчетных формул настройки кинематических цепей.
5. Дать общий вид станка мод. МА70Ф4 с ЧПУ и указать основные узлы. Определить назначение станка и привести его техническую характеристику.
6. Дать схему кинематической структуры станка и проанализировать ее.
7. Дать кинематическую схему станка и проанализировать ее.
8. Привести циклы обработки колес различных типов на станке.
9. Выполнить сравнительный анализ кинематики и технологических возможностей станков моделей 5М324А и МА70Ф4.
Выполнить сравнительный анализ кинематики зубофрезерного станка модели 53А50 и зубофрезерного станка модели 53А20Ф4 с ЧПУ.
1. Дать общий вид станков мод.53А50 и указать основные узлы. Определить назначение станка и привести его техническую характеристику
2. Дать принципиальные схемы обработки на станке.
3. Выполнить частные структурные схемы станка и проанализировать их. Дать общую структурную схему станка.
4. Выполнить кинематическую схему станка и проанализировать ее с выводом формул для определения частот управления приводом главного движения и для определения частот управления перемещениями по координатам.
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им. Даля 166
- ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им. Дегтярева 174
- КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им. Макарова 543
- НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им. Герцена 123
- РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им. Гагарина 114
- СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им. Каразина 305
- ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Полный список ВУЗов
Чтобы распечатать файл, скачайте его (в формате Word).
Источник